Mais um artigo da Fatec Garça publicado em evento internacional
O APISAT (Asian Pacific International Sysmposium on Aerospace Technology) foi realizado nos dias 25 a 27 de novembro de 2015 em Queensland, Australia. Nele, foram apresentados trabalhos relacionados aos avanços tecnológicos na indústria aeroespacial. O […]

O APISAT (Asian Pacific International Sysmposium on Aerospace Technology) foi realizado nos dias 25 a 27 de novembro de 2015 em Queensland, Australia. Nele, foram apresentados trabalhos relacionados aos avanços tecnológicos na indústria aeroespacial.
O artigo “UAV Formation Controller with Leader-follower Interchange – A Case Study Using X-Plane”, elaborado pelo professor da Fatec Garça Luiz Carlos Querino Filho, pelo professor da UFSCar Roberto Santos Inoue e pela professora Kalinka Regina Jaquie Lucas Castelo Branco da USP de São Carlos, foi apresentado no evento pelo prof. Roberto em sessão realizada no dia 26 de novembro.
O texto relata os resultados obtidos na implementação de um sistema de controle para veículos aéreos não tripulados de asa fixa voando em formação. O trabalho faz parte do projeto de Doutorado do professor Querino, em andamento na USP de São Carlos.
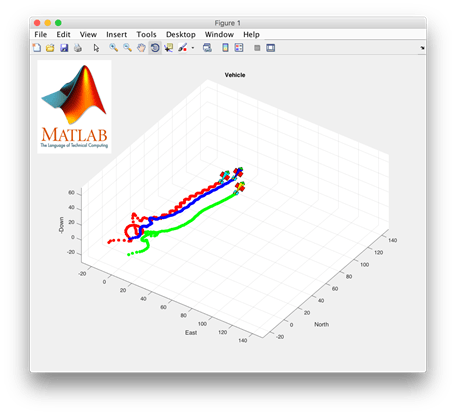
Usando o software de computação científica MATLAB, um controlador PID (Proporcional-Integral-Derivativo) foi implementado para estabilizar a altitude e o controle de curso de três aeronaves. Um modelo simplificado em três dimensões foi desenvolvido, também em MATLAB, para visualização da trajetória das aeronaves.
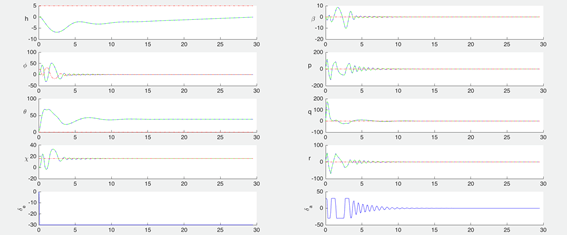
A análise dos dados relativos aos ângulos de atitude do avião (f e q), como ângulos de curso e sideslip (c e b), assim como as taxas de variação dos mesmos (p, q e r) demonstra que estes foram estabilizadas corretamente, como indicado pelos gráficos obtidos no MATLAB e apresentados no artigo.
Futuramente, o sistema de controle será adaptado para a metodologia (H-infinito), utilizada para obtenção de robustez e desempenho garantido em sistemas com variações abruptas. O código desenvolvido em MATLAB será então portado para linguagem C++ e implementado dentro do simulador aéreo X-Plane.
Detalhes sobre o simpósio podem ser obtidos no site oficial:
Enviado por: Profº Ms Luiz Carlos Querino Filho
Veja também



